Teaching a Robotic Guide Dog to Walk with Human User.
Human gait analysis and its application to HRI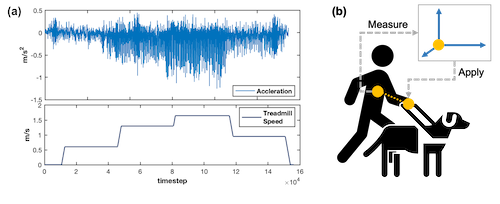
Human gait analysis and its application to HRI
Motion capture dataset in Mujoco environment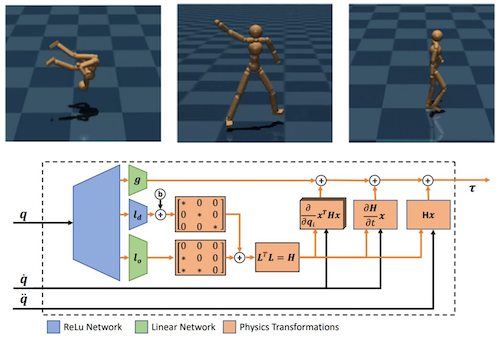
Reachability map of 7-DoF mobile manipulator
Published in Preprint, 2022
This paper aims to disambiguate the human’s referring expressions by allowing the agent to ask relevant questions based on semantic data obtained from scene graphs.
Recommended citation: Yoonwoo Kim*, John Seon Keun Yi*, Sonia Chernov. (2022). "Incremental Object Grounding Using Scene Graphs." ArXiv. https://arxiv.org/abs/2201.01901
Published in Thesis, 2023
This paper is about representing task planning problems in factor graphs.
Recommended citation: Yoonwoo Kim. (2023). "Task Planning in Factor Graph Representation." Thesis. http://ywkim0606.github.io/files/Yoonwoo_thesis.pdf
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Graduate (OMSCS), Georgia Institute of Technology, 2021
• Assisted class size of 600 students online through holding weekly office hours, replying to questions online, and writing exam questions.
Undergraduate/Graduate course, Georgia Institute of Technology, 2022
• Assisted class size of 250 students on campus by holding weekly office hours and replying to questions online.